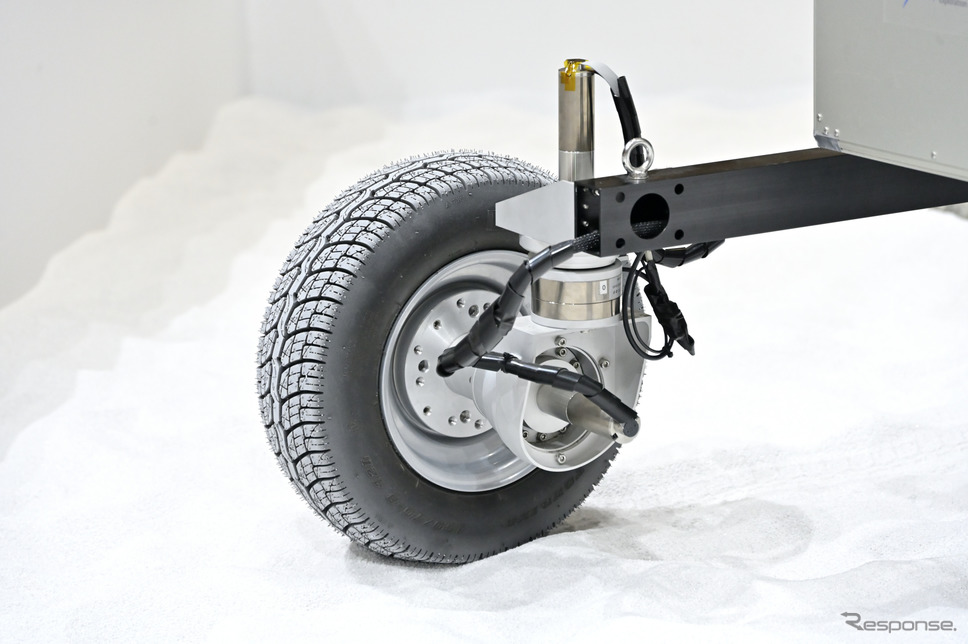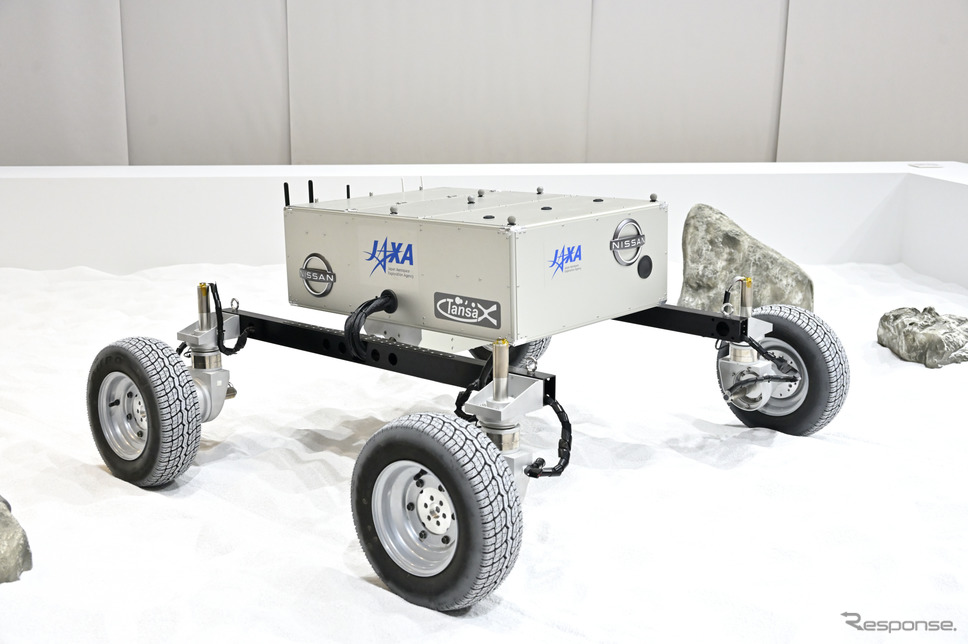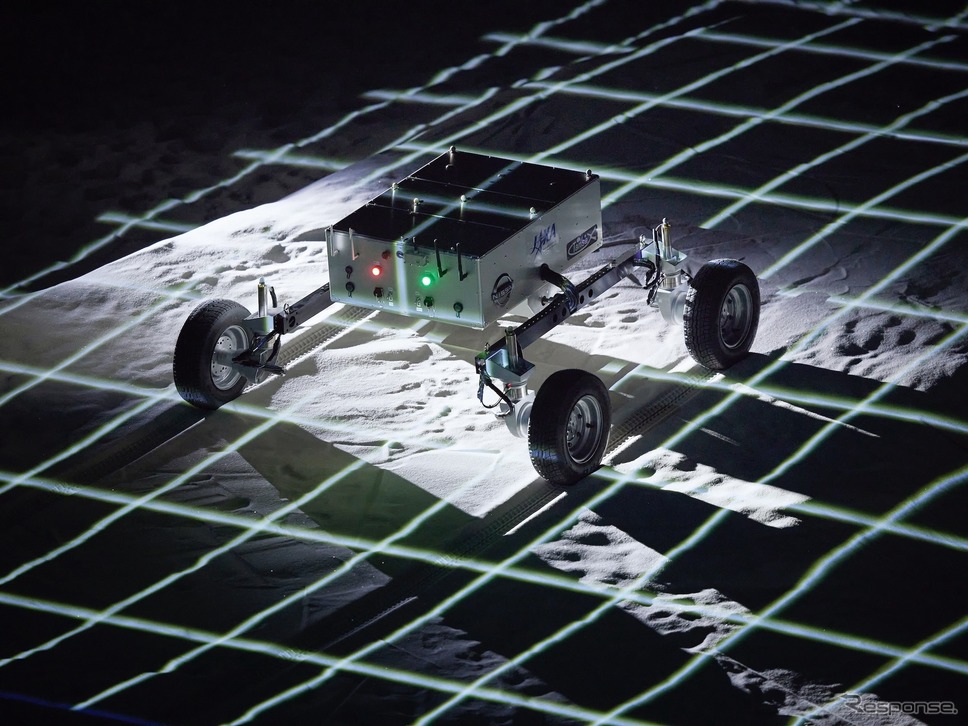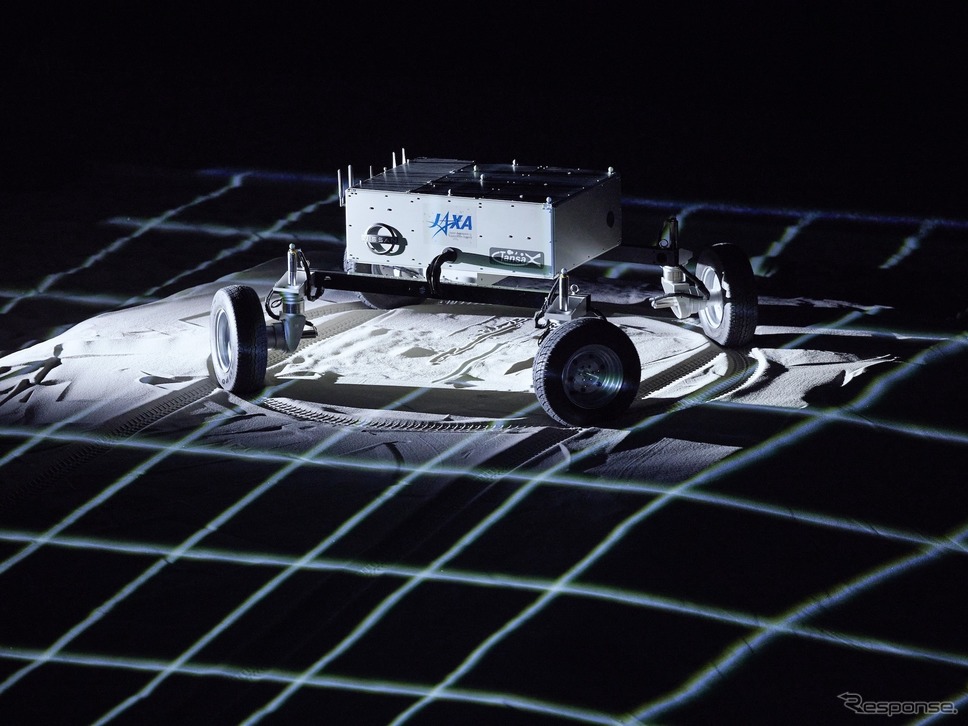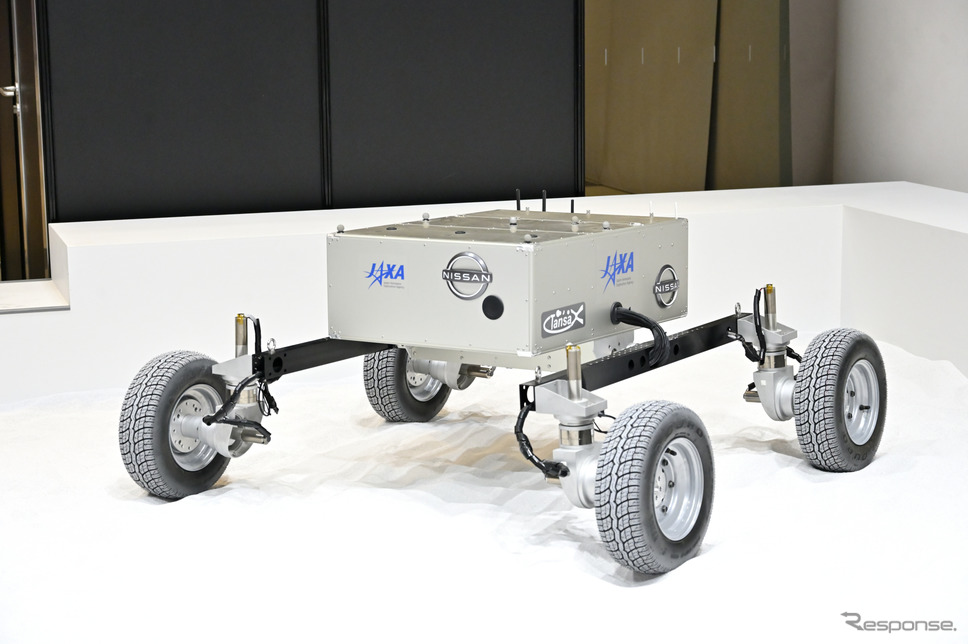
日産グローバル本社ギャラリーにおいて12月2日から27日まで開催されている「日産フューチャーズ」。そこでは日産とJAXAが共同研究中の月面ローバ(ローバー)試作機が公開されている。
◆共通の課題に向けて
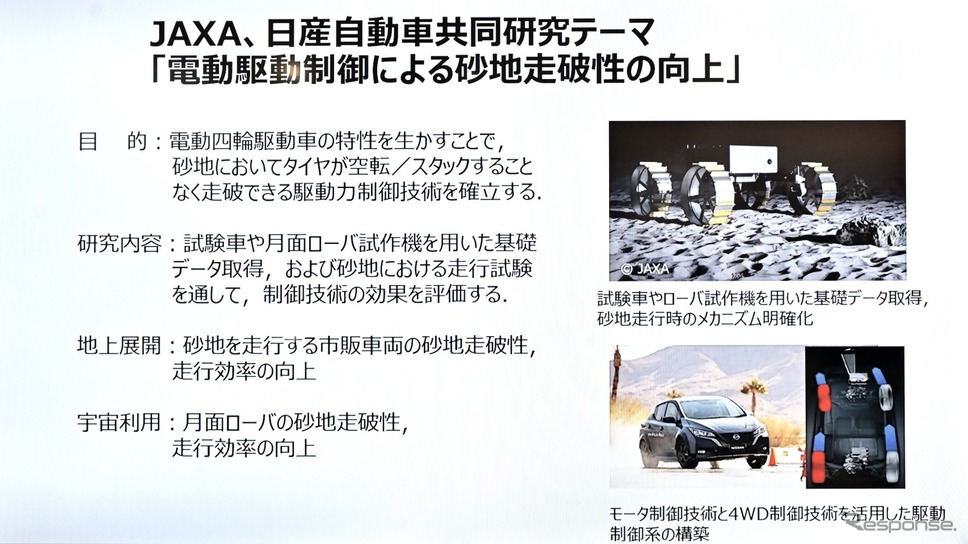
そもそもなぜ日産とJAXAが共同研究を行っているのか。日産自動車企画・先行技術開発本部先行車両開発部主管の舞原壮一氏によると、テーマは、「電動駆動制御による砂地走破性の向上」だという。そこには共通の課題があった。「電動四輪駆動車の特徴を活かすことで、砂地においてスタックした際、駆動力制御で乗り越えたりする技術を確立しよう」というものだ。それが実現できると、JAXAでは「月面は砂地なので、そこでの走行効率の向上」。日産では「砂地、砂漠での走行性の向上につながる」のである。
◆e-4ORCEはもっと広がってよい技術
この技術のベースとなのが電動駆動四輪制御技術「e-4ORCE」である。日産自動車は古くから電動化を進めて来ており、10年以上前に初の量産EV、『リーフ』を出した。「それ以降、電動技術を磨いていったので、ここには1日の長がある」と舞原氏はいう。同時に、「4WD制御とシャシー制御の技術も古くから培ってきている。しかし、それらは個別技術として培ってきたので、今回はそれらを統合して総合的に制御することで、基本性能である走る曲がる止まるをさらに磨き上げる」と述べる。
特に、「他社のEVと比較し、アクセルをグッと踏み込んで加速していくシーンでは、すぐに、明らかに素早いレスポンスで立ち上がり、その後もスムーズに加速。これがe-4ORCEのベースとなる技術だ。こういったところは未だに他社に対してアドバンテージを持っており、そういった制御品質の高さが電動駆動の質の高さそのもの。これが大きなポテンシャルだ」と舞原氏は自信を見せる。
そして、e-4ORCEがもたらす価値について舞原氏は、「電動化技術を磨くことで、いま述べた力強く滑らかな走りはベースとして培ってきた技術がある。そこに加えてe-4ORCEでは、乗る人全てに快適な乗り心地や、クルマ酔いしにくい、疲れないといった価値を提供したい」。その一例として、「クルマが減速しているシーンで、通常の制御なしでは頭がぐっと前にもたれるような形で少し揺れてしまう。そこに前と後ろにある駆動モーターを制御することでフラットに減速していく。そうすると頭がぐっと前に行くようなことを少し抑えられ酔わない、疲れないといったところに繋がる」と説明。
また、「卓越したハンドリング性能として、運転が苦手な人でも上手くクルマに乗ることが出来、楽しむことが出来ることを狙う」とし、「前と後ろのモーターを上手く制御しながら、さらにブレーキを少し制御することによって、ライン通りにトレースして行くような技術をもたらしている」と話す。
そして、「路面を問わない安心感をもたらせるよう、雪道などでも安心して乗れるようなシーンで活用して価値を提供したい」とコメント。e-4ORCEは、「前後のモーターとブレーキと4つのタイヤを上手く使うこととから、もっと広がっていい技術であり、色々な価値をお客様に提案できる」と語る。その発想から、「砂漠のようなシーンで、砂の上を上手く走るのはプロドライバーでもない限り非常に難しい。そこをどんな方でも乗ってもらいたい。そういったところにこの技術を提供できないかというところから、JAXAと共同研究に至った」とのことだった。
◆砂地でのスタックを回避するために
さて、宇宙開発・探査先である月や火星は基本的に地上と同様の砂地で、特に細かな砂、レゴリスで覆われた軟弱地盤である。そこで活躍するのが、月面探査機、火星探査機のローバというもので、遠隔で探査が行われる。そのときに、「その砂場にローバがスタックしてしまうと、研究にとっての命とり。実際にNASAでも火星ローバが車輪を取られて動けなくなったことが過去にあった。そこでスタックをしないように制御することが大きな課題だ」と舞原氏。さらに「太陽光で少しずつ補充はしているものの、エネルギーがとにかく少ないので、いかに効率よく移動するかも大きなテーマだ」という。従って、「スタックしたり、余計な電力を使ってそこから脱出するようなことは避けなければならない。そういったところも含めていかに効率よく移動するかも課題だ」という。
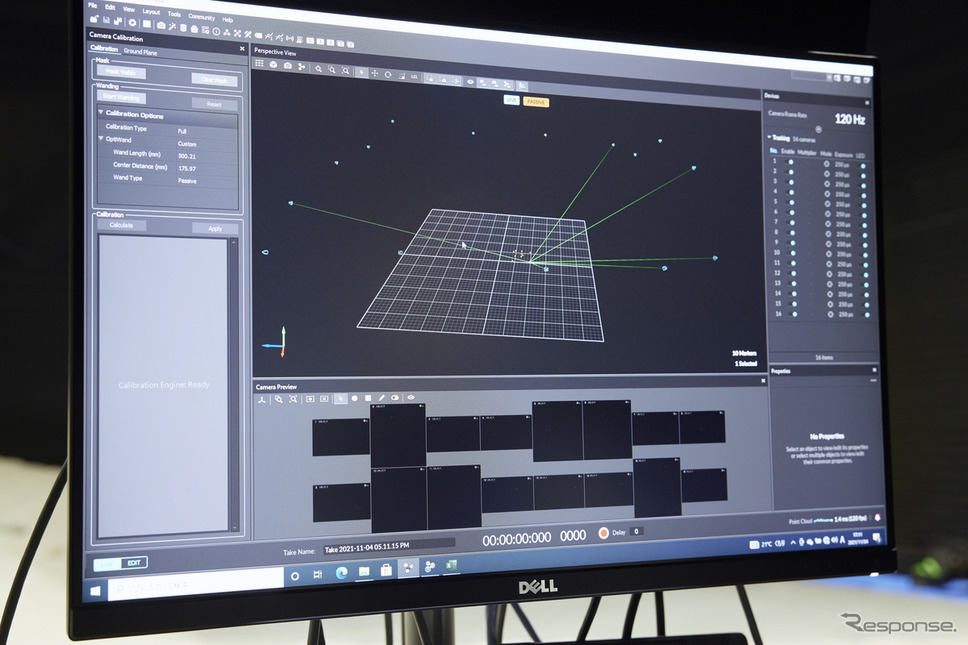
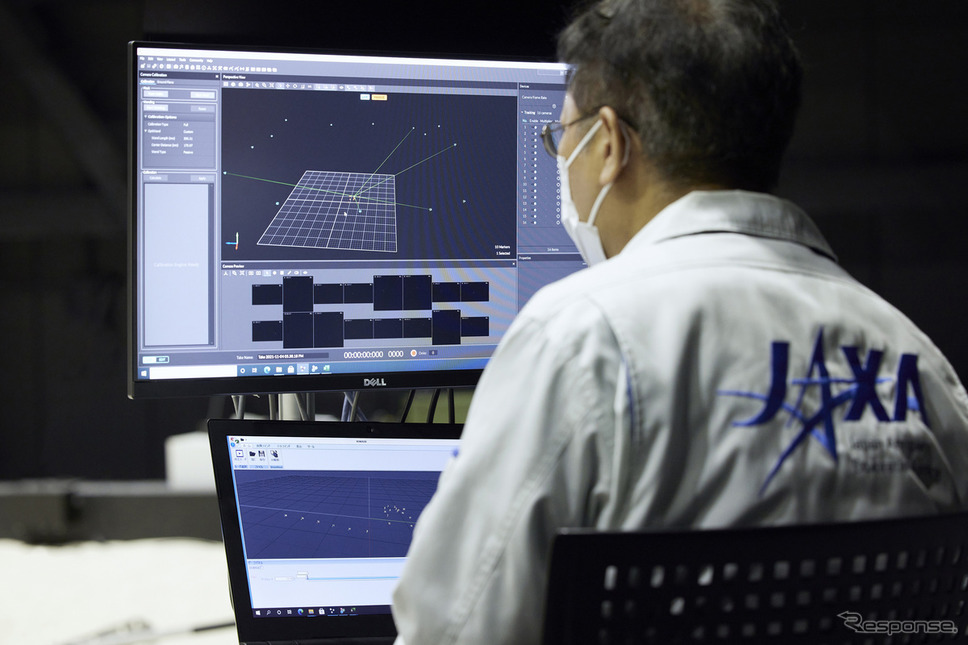
そこで、まずは原理研究として、JAXAの探査フィールドに砂地があることから、走行メカニズムの解明。「ここは全天候型で砂の状態が常に一定であることを活用。少しずつ原理が解明していくと、シミュレーションに繋ぎ、さらにクルマの評価が出来るように進めている。JAXAもここで評価した結果が、ローバにフィードバックできるという流れだ」とコメント。
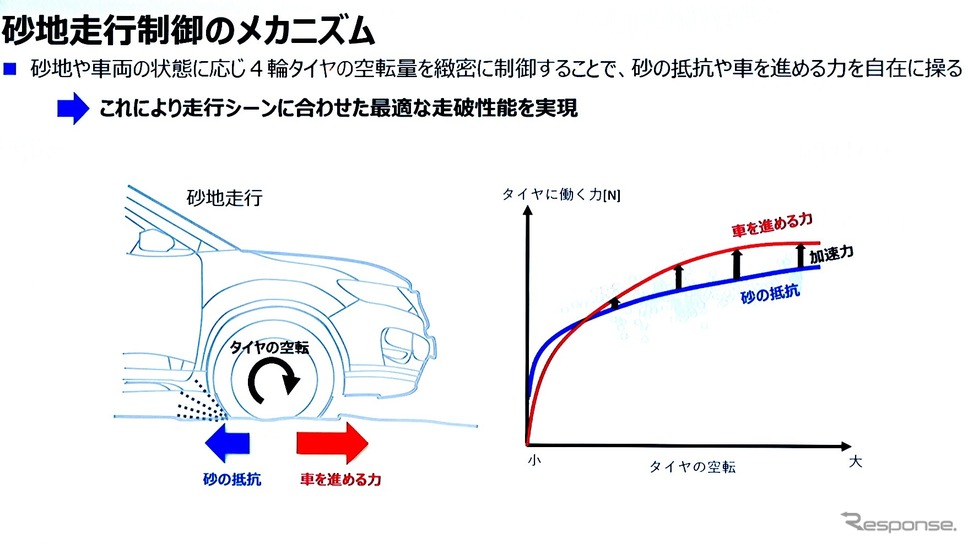
そこから見えてきたことは、「タイヤの空転と、タイヤに働く力との間に大きな相関関係があることだ。これはタイヤの空転の範囲が大きなポイントで、これ以上回転が大きくなるとスタックしてしまい、弱いと前に進まない。この間に美味しいゾーンがありそうだということだ。そこでタイヤの回転数をコントロールすることで一番美味しいところを上手く使えるように研究を進めている」と舞原氏は語った。
今回日産フューチャーズで展示している試作機は、外部で公開されるのは今回が初めてである。
◆宇宙と地球の共通点は“砂”
ここからは日産自動車企画・先行技術開発本部先行車両開発部部長の中島敏行氏(以下敬称略)にお話を伺った。
----:月面や火星の砂地の上を走るということが大変だということを初めて知りました。クルマとの共通性もあるのですね。
中島:一見月の上を走る乗り物、移動物体と自動車はかなり違うと思うでしょう。ただ、砂に足を取られたときに、どのように進むかということと、電動モーターで駆動しているところは凄く共通しています。砂漠などを走るラリーなどがありますが、これはプロが乗っているのでスタックしても自分で脱出できます。しかし一般の人だとなかなか難しいですよね。それをどんなお客様でも安心して走ってもらいたいというのがe-4ORCEを発展させていく考え方です。
そしてJAXAの探査機は、スタックさせたら誰も助けに行けないという世界ですから、そこが結構共通しているのです。私も知らなかったのですが、月の砂は本当にサラサラですぐに潜り込んでしまう。それを電動駆動の場合は精密に上手く制御できるようになるのです。内燃機関のクルマであったら、そこまでの精密な制御はできないのですね。そのところを1/1000秒、1/10000秒という制度で制御ができる。こういった技術を初代リーフの時にかなり作り込みましたので、未だに他社に負けてはいないわけです。その結果、砂の状況においてトルクを抜いたり出したりすることができるのです。
今回JAXAと一緒にやってきてわかったことは、トルクをかければかけるほど砂をかいて沈んでいってしまい、沈むと砂に埋もれて抵抗が増えて進めなくなってしまう。ところがトルクを抜きすぎると当然走れなくなる。その間に美味しいポイントがあるということです。つまりパワフルに走りたければここ、効率が良くとにかく無駄なエネルギーを使わずにというところはここという良いポイントがあって、それを探しながらそこにピタッと合わせていけるのは、この電動駆動の精密な制御とレスポンスがあればこそなのです。
----:そこまで内燃機関の制御と電動とでは差があるのですか。
中島:内燃機関は電動駆動に対してレスポンスの悪さがあります。アクセルを踏んで、スロットルを開いて、空気を吸って、引火させて、爆発して、ピストンが動いて、その後ドライブシャフトがねじれてとずっとメカが続いていくので相当遅れてしまいます。ところが砂の状態は刻一刻と変わってしまうので、そんなことをやっているとその状況に応じた制御ができません。
電気になることで原動機自体の応答が全く違ってきます。実は電気になってもモーターから先にメカが入るので、先ほどお話したような時間差が出てきます。スタックしかけたときに普通にトルクをかけるとガクガクガクとなるので、皆さんアクセルを戻したりしながらトルクを抑える。その際にいかにトルクを抑えずにクルマの動きを変化させるかということを最初のリーフでやっているのです。そこから10年以上お客様のフィードバックを頂きながら開発していますので、そこは我々のアドバンテージになっています。これまでそういったことは走り味に使っていたのですが、それだけではなく、今回の制御や『アリア』のe-4ORCEの制御などにも使えるようになったので、この武器を色々な所に使っていきたいと考えています。
----:砂地からの脱出についても今まではアクセルコントロールだけでやっていたのですものね。
中島:アクセルを踏んで抜いて踏んで抜いて。ただし普通に走ってしまうとアクセルを踏みっぱなしにしてしまうので、そのまま埋まってそれ以上動けなくなってしまっていたわけです。e-4ORCEでは、一般的には砂漠はなかなかないですが、例えば雪道はいっぱいありますよね。
----:ただ、寒さにバッテリーは弱いですね。
中島:確かに寒さは懸念点でこれまではバッテリー容量などから心配な面もありました。しかし、例えばアリアなどではかなりの容量を積んでいるのでだんだんそういう心配もなくなってきています。
そのバッテリーという面ではe-POWERも駆動系はEVと共通なのでe-4ORCEはe-POWERにも提供できるのです。そういう意味で我々のもうひとつのアドバンテージはe-POWERを持っているということです。充電の関係やバッテリーが心配というお客様にはe-POWERでもe-4ORCEは採用していけるでしょう。