ホンダは立ちゴケしない二輪姿勢制御がより自然な操作できるように改良を加えたライディングアシスト技術を報道陣に公開した。
ホンダは2017年のCESと東京モーターショーに立ちゴケしない二輪姿勢制御技術を公開しているが、今回はその技術をさらに進化させたもの。
開発に携わった本田技術研究所先進技術研究所の秋元一志チーフエンジニアは「同じようなコンセプトで改良して進化したのが、今回のライディングアシスト2.0。中身はASIMOに代表されるような二足歩行ロボットの姿勢制御技術を応用してバイクのバランスをアシストすることを試みている」と話す。
というのも「バランスをとるのは人でもロボットでもバイクでも実は一緒で、例えば片足で足首をちょっと動かしながら接地点を移動しながらバランスをとるのと、身体の重心を動かしてバランスをとる、この組み合わせ。バイクも同じでステアを切ると接地点が移動する。車体を動かすと車体の重心でモーメントが変わる」からだ。
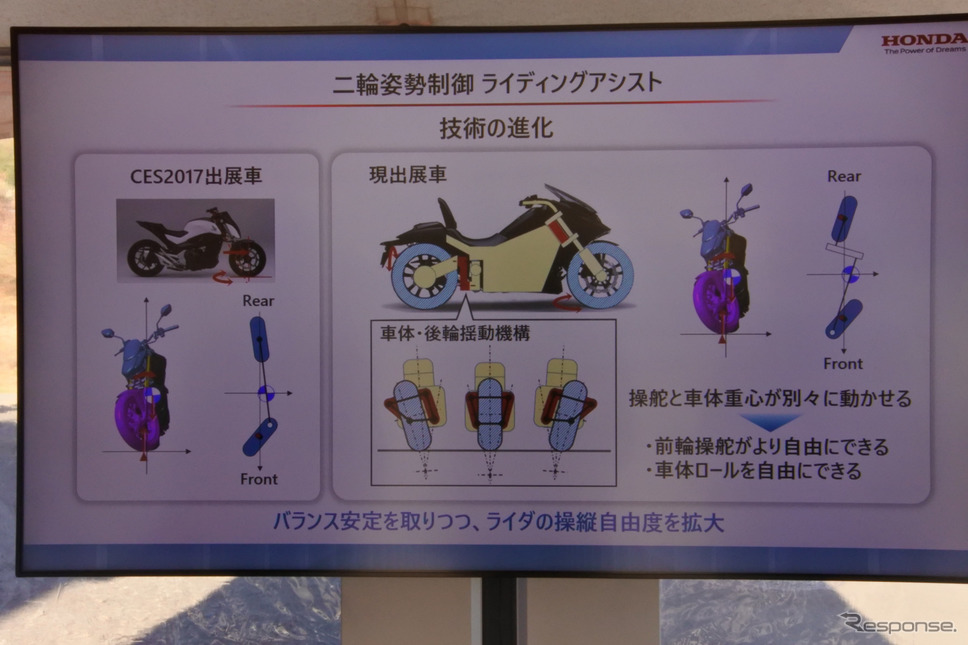
秋元氏によると「2017年のライディングアシストは前輪を前に出すことよってステアと車体の左右の動きの関係性を少し変えることで接地点の復元力と車重の引っ張り上げる力を足して、それによって復元力を増して停止時でも立てるようにした。ただこの方式ではステアに強い制御が入るので、人が曲がりたい時に干渉があって違和感が残ってしまった」とのことだ。
そこで「今回は、それを改良するために車体とリアの間にクルマと車輪が揺動するような機構を取り付けて、ステアだけではなくて車体の重心を自由に別途で動かせるようにして復元力を出すことをやった。それによって操舵と車体重心が別々に動かせるので、前輪操舵がより自由になり、かつ車体ロールも自由になることで、バランスの安定をとりつつライダーの操縦自由度を拡大した」という。
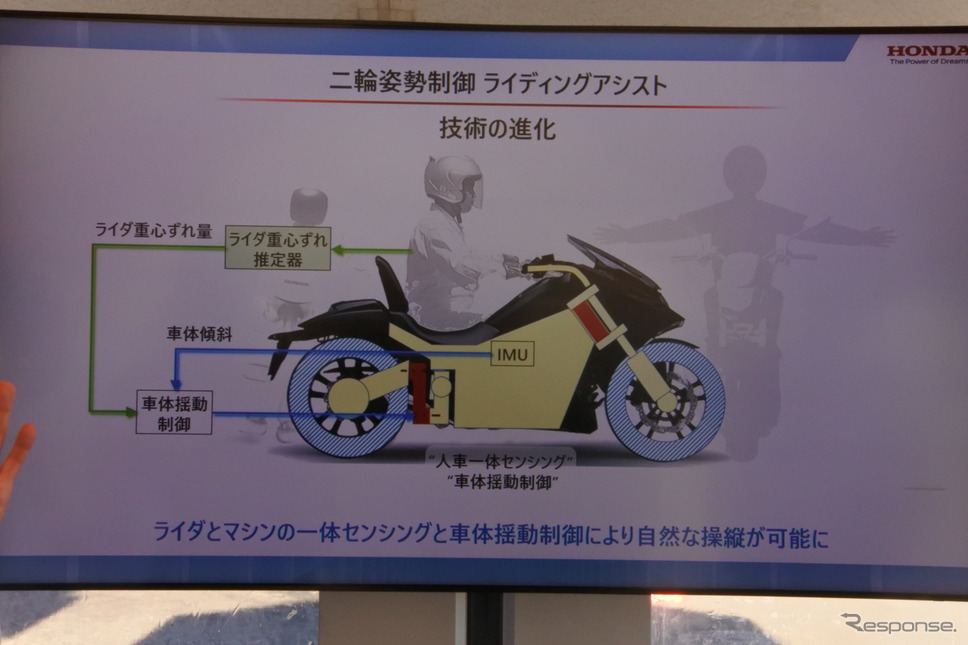
具体的な制御技術について秋元氏は「従来は車体の傾斜計を使った情報からバランス制御していた。今回はライダーが重心をどれくらい倒しているか、その移動量を推定する機構、計算を入れた。その推定量の影響を与えて、人が入れた方向に馴染むような制御を加えることで、さらにライダーとマシンの一体センシングと車体揺動制御によって自然な操縦が可能になっている」と解説する。
栃木県にあるホンダのさくらテストコースで行われたデモでは空車自立、停止時に立っている状態、時速2kmでの旋回、切り返しなどが報道陣に公開された。デモカーは低速走行しながら目印のパイロンに近づくと一旦停止、ライダーは足を地につけることなく再びデモカーを発進させ、低速で旋回したのち、目の前のS字コースを低速のまま通り抜けていった。