スバルは東京・お台場地区で開催された「SIP自動運転実証実験プロジェクト」の展示・試乗会(9月29日〜10月1日開催)に参加し、8台のカメラを搭載した実験車両『HARMONIA DRIVE』を公開。シミュレーション技術を使った安全優先の実証実験に取り組んだ結果などを披露した。
◆8個のカメラで全周囲を捉えて安全を担保して走行する
「スバルとして(自動運転走行の)基本はあくまでカメラで捉えた画像処理で行く」と話すのは、スバル技術研究所の長谷川 悠さんだ。
スバルが披露した自動運転の実験車両はスバル『XV』をベースに計8個のマルチカメラを搭載した車両。そのカメラの内訳は、アイサイトに使う2個のカメラを使ったステレオカメラを基本に、フロントには広角用2台と望遠用1台の計3台のカメラを追加。さらに左右のドアミラーに2台、後方用カメラに1台を加え、トータル8個のカメラを組み合わせたもの。
一般道を自動走行するには、交差点で左折した際に歩行者や自転車などの完全補足が欠かせないが、現行のアイサイトでは広角化を図っているとはいえ、対象は前方が中心。それには役不足だ。また、自動運転化には信号の色の識別も欠かせない。そこで、8個のカメラを搭載することで、それらを全周囲に渡って完全捕捉することを目指したのだ。
車両をよく見ると中央部にはLiDARも備えられている。これはカメラでエラーが発生した際の冗長性を確保するためのものということだが、長谷川さんによれば「アイサイトが捉えられない状況になった際は、運転はドライバーに戻すことを基本としている」とも話す。スバルにとってセンシングはカメラが基本であることに変わりはないのだ。
ただ、8個のカメラを映像で捉えるとなれば高度な画像処理が欠かせない。特にフロントは高解像度な4K映像で捉えているために、その処理に見合うプロセッサーが必須。その役割を担っているのがNVIDIAのプロセッサーで、フロント用と、左右+後方用それぞれに専用のプロセッサーを充て対応することにした。
このシステムの課題はバッテリーの消費で、現状ではたとえばお台場の実験ではおよそ5kmのコースを3周〜4周するとバッテリーが切れてしまうそうだ。そこでカーゴルームには専用の給電システムを搭載して実験を実施したという。今後はより低消費電力で動作するシステムの開発が求められるだろう。
◆コネクテッド化に普及で高度な“先読み”が可能となる
一方、この実験車両をお台場で走らせるにあたり、スバルはお台場の仮想空間を構築して、そこを自動運転車を走行させるシミュレーションによる検証も実施している。これは自動運転の実車試験と一致性が高い安全性評価を仮想空間で実現できるようにする「DIVP(Driving Intelligence Validation Platform)」に基づくものだ。
これにスバルのカメラ認識技術・機械学習を連携させ、たとえば高精度地図を使って走る経路追従が機能するか、歩行者を検知してきちんと止まれるか、信号情報を受信して間違いなくクルマが制御できるかなどをシミュレーション上で繰り返しテストを行い、その上でリアルな実証実験に臨むのだ。これは実験に臨む際のコスト低減に大きなメリットをもたらしたという。
また、スバルは高いレベルの自動運転を実現するためにはコネクテッドは必須と考える。これについて、スバル技術本部でADAS開発に携わる阿部幸一さんは「自律でセンシングして対応しているだけではどうしても限界点があり、その限界点をコネクテッド化することで、自動運転システムにおける多重性、冗長性の向上が期待できる」と説明する。
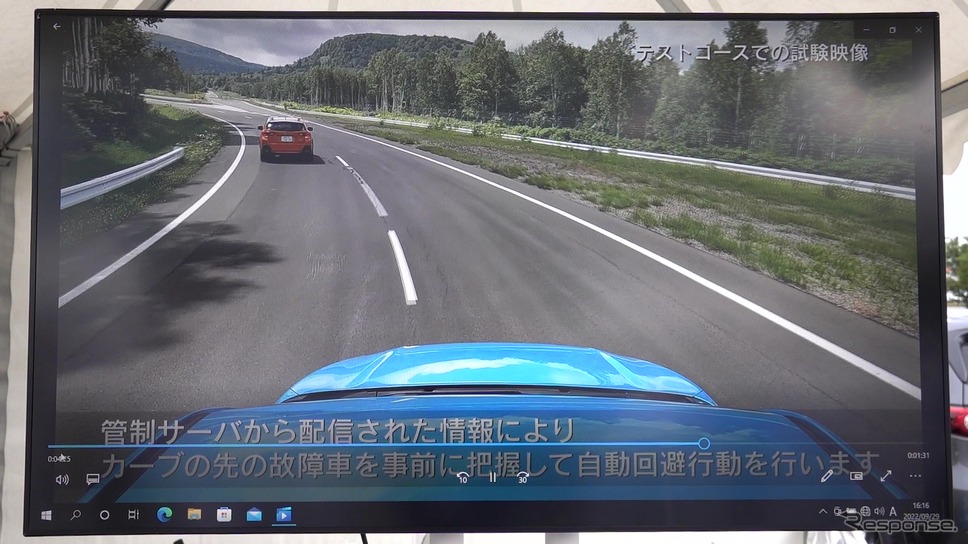
特にコネクテッドカーが普及することで、「サーバー側で車両の位置を把握できるようになり、それをサーバ側で管制すれば、将来の事象発生が予測できる“先読み”が可能になる」(阿部さん)。つまり、それがスムーズな自動運転制御や衝突回避と行った事故防止制御の実現につながる可能性をもたらすというわけだ。
阿部さんは、「スバルとしてはこの実証実験の結果から、カメラによるLiDARに頼らなくても十分なセンシングができた」とも話す。それはアイサイトの機能拡張として捉えることもできる。この実験車両からはそんなアイサイトの将来像を垣間見た気がした。