NEXCO東日本は5月18〜19日、FaroStarとともに、福島県南相馬市のセデッテかしまの東側に位置する森林で、ドローンの自動衝突回避システムの実証実験を実施した(6月3日発表)。
実証実験は、将来の無人航空機やドローンの活用を視野に、安全な飛行の確保を目的に実施した。ACSL製の実機ドローンに、FaroStarが開発した衝突防止自動管制技術「オーロラ」を搭載し、自動飛行中のドローンに、別のドローンを近づけ、自動で衝突を回避できるかを検証した。
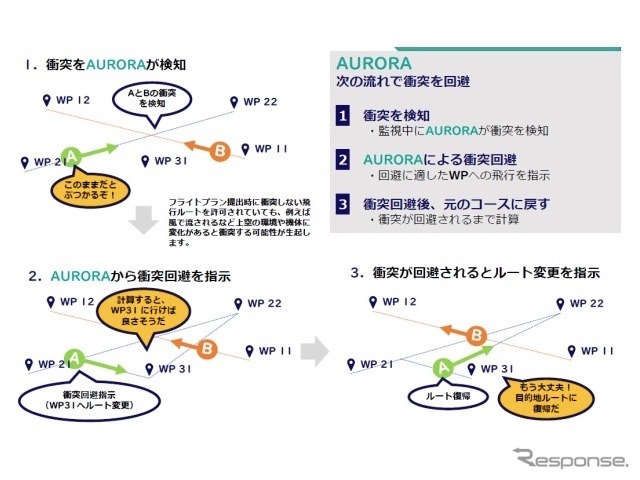
高度30〜50m、延長700mの飛行経路で4回の衝突実験のすべてで衝突回避を確認したとしている。今回効果を実証した衝突防止自動管制技術は、航空機やドローンの飛行情報を取得し、データを基に飛行体同士が衝突する可能性を検知すると、「空飛ぶクルマ」を模擬したドローンに回避可能なウェイポイントを指定して自動回避、衝突を回避できたと判定すると次のウェイポイントに誘導する。
実証実験は、2021年9月から募集したアクセラレータープログラム「ドラぷらイノベーションラボ」で採択された企業との実証実験。