京セラは、「人とくるまのテクノロジー展 2022」(5月25〜27日、パシフィコ横浜)に出展した。展示テーマは「京セラのモビリティ技術で叶えるつながる地域社会」。車両とインフラを協調させることで、より安全、安心な社会の実現を目指そうというものだ。
◆路側に設置したFIRカメラとITS無線で交通インフラ情報を収集
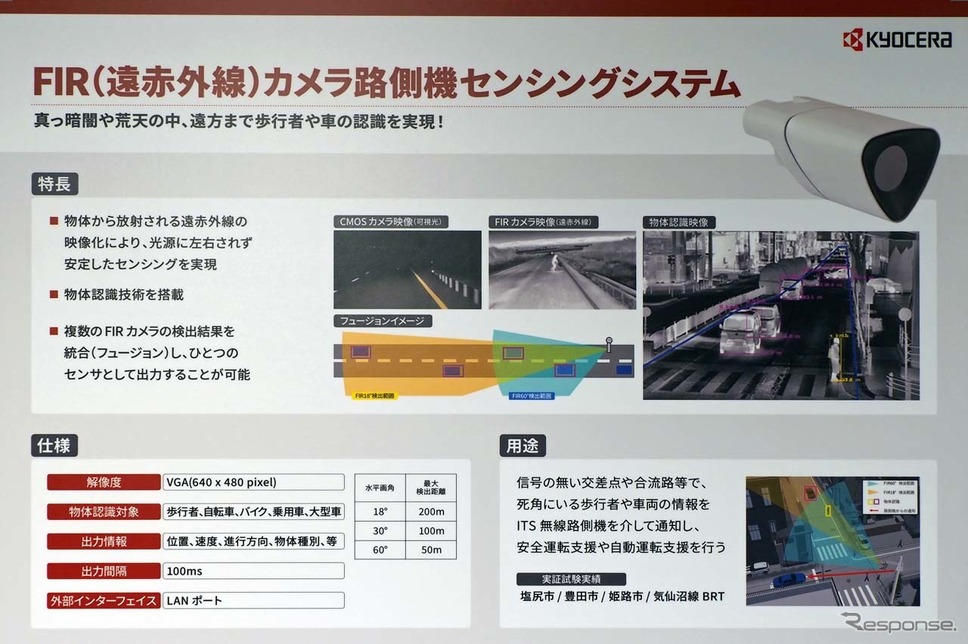
具体的には、車や自転車などと無線通信することで、歩行者や車両の位置、信号情報などの交通インフラに関する情報を収集し、それを集約して配信する。これにより、自車からは見通せない死角にある情報を車側に提供して事故低減につなげるわけだ。
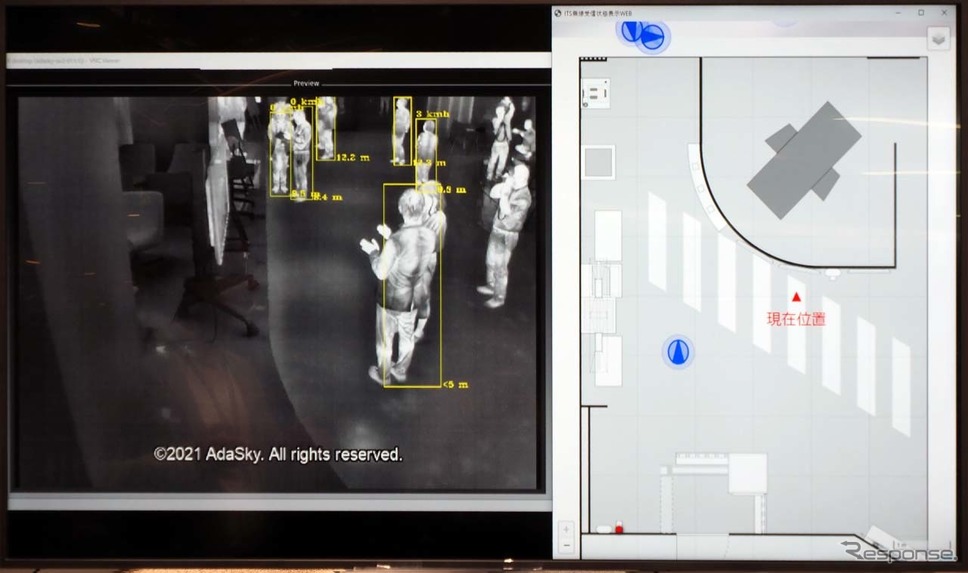
そのセンシングに使われるものとして京セラが用意したのが「FIR(遠赤外線)カメラ路側機センシングシステム」だ。物体から放射される遠赤外線を映像化することにより、環境に左右されにくい安定したセンシングが可能になるという。
開発担当者は「信号機の色一つにしても、イメージセンサーで撮影すると西日や濃霧といった環境に左右されやすいが、FIRカメラなら対象物から放出されている遠赤外線を介して映像化できるので検知しやすい」とFIRを採用するメリットを話す。
そして、センシングした情報を車両側に送信するのが「ITS無線路側機」だ。FIRカメラをはじめ、様々な機器を接続できるマルチプロトコル仕様となっており、幅広いセンシングに対応できる。通信規格は国内標準通信規格として策定されている760MHz帯ITS無線/LTEを採用するが、周波数帯が異なる海外の規格にも対応は可能だという。
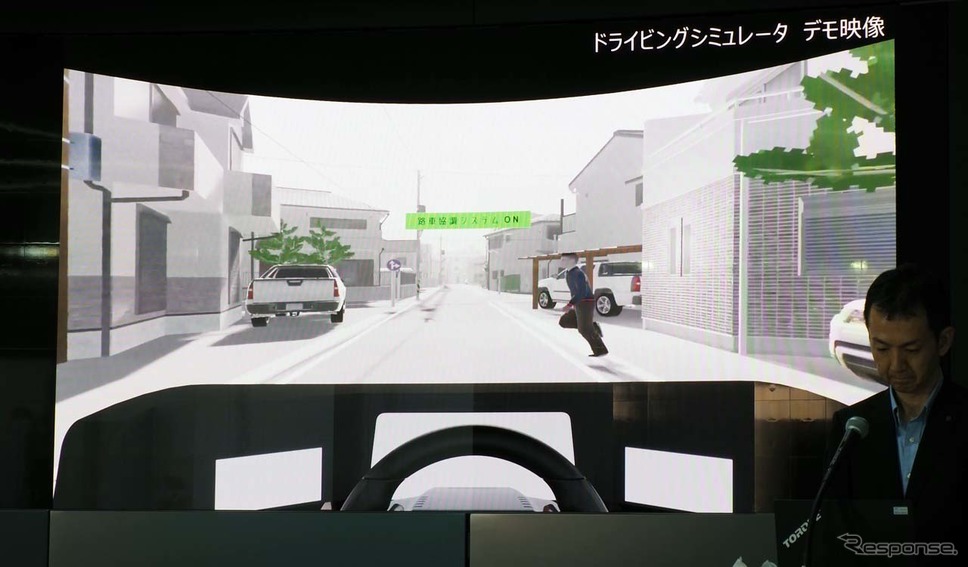
人とくるまのテクノロジー展の会場では、この「路車協調システム」での効果を体験できるドライビングシミュレーターを出展。会場ではその効果を体験しようと、多くの人が順番を待つほどの人気ぶりだった。
◆死角となる部分を透明化する『運転視界拡張技術』をデモ
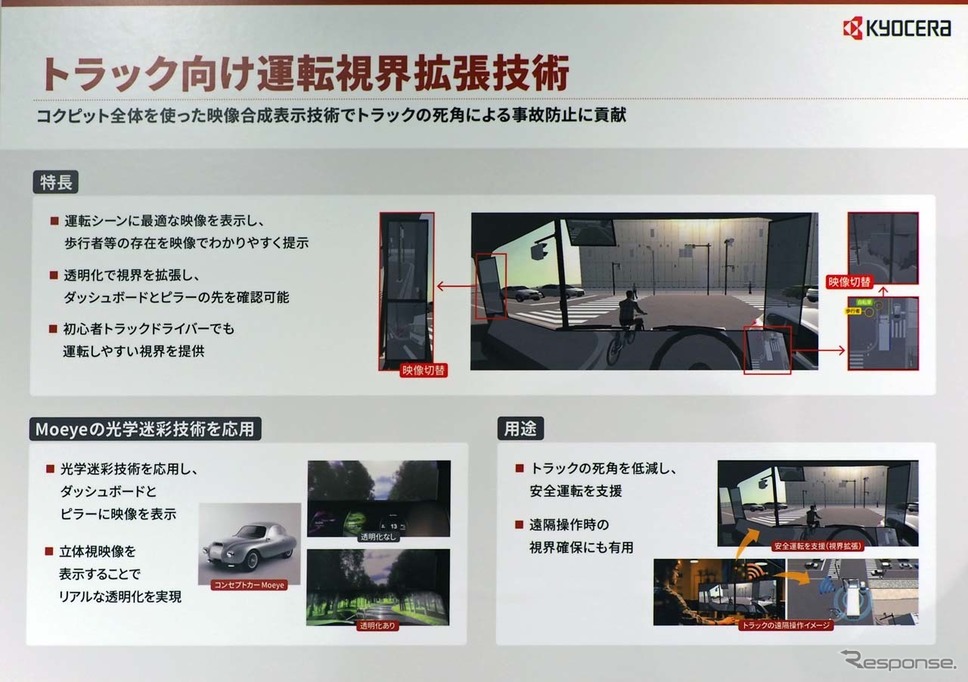
もう一つ、会場で大きな注目を浴びていたのが「トラック向け運転視界拡張技術」だ。これは大型トラック等で課題となっている死角低減を目指す技術で、2020年9月に開発発表された『Moeye(モアイ)』に搭載された光学迷彩技術をベースとする。この技術は東京大学 先端科学技術研究センターの稲見昌彦教授と協働により京セラが独自に開発した。
この技術の核となるのが「再帰性投影技術」で、光が入射した方向にまっすぐに反射する性質を持つ再帰性反射材を用いることで、対象物を透明化して見せることができる。記者会見会場では、ドライバーから見えない部分を映像によって分かりやすく表現する設備をデモとして用意した。
設備にある小さな穴を覗くと、そこには太めのピラー越しに陰となる部分があり、そこにカメラで撮影した映像をリアルタイムで投影する。これにより、ピラーがまるで透明化されたように見えるのだ。この技術をダッシュボードやピラーに応用することで、ドライバーからの死角を大幅に減らすことができるわけだ
展示ブースにはレーザー関連技術も出展された。1km先まで明るく照らせる「レーザーヘッドライト光源モジュール」は、日本仕様には未導入であるものの、すでにBMWにも採用されている技術。従来LEDと比較して、輝度は100倍、到達距離/コントラストで10倍もの性能を発揮できるという。
「レーザーファイバー照明デバイス」は、発光部分をレーザー光源や電源と離れた場所に置くことができるため、間接照明としてデザインの自由度を高められる。新たな空間創出に貢献するものとして注目される。
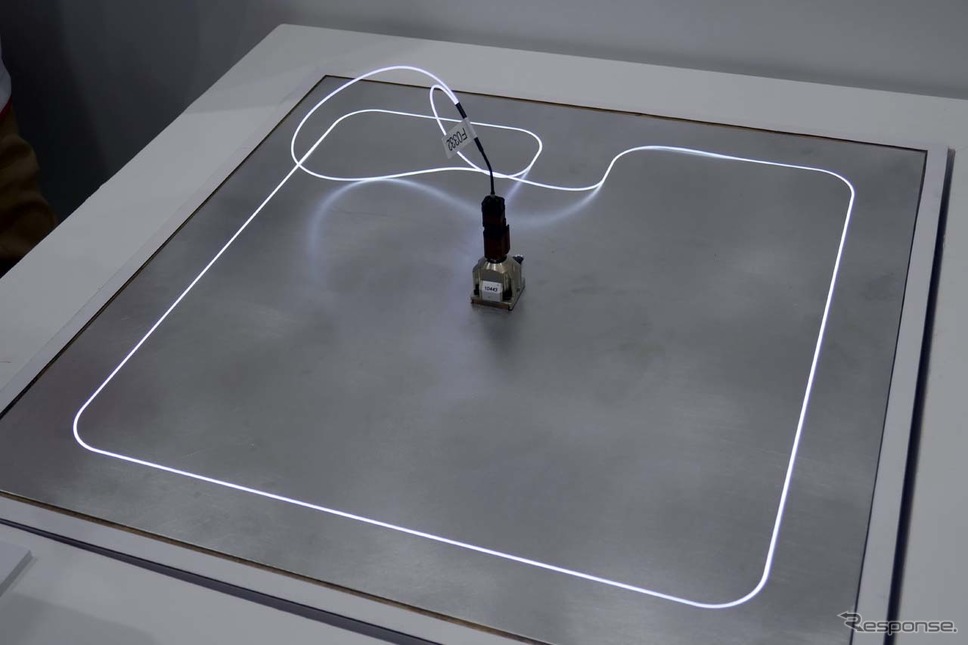
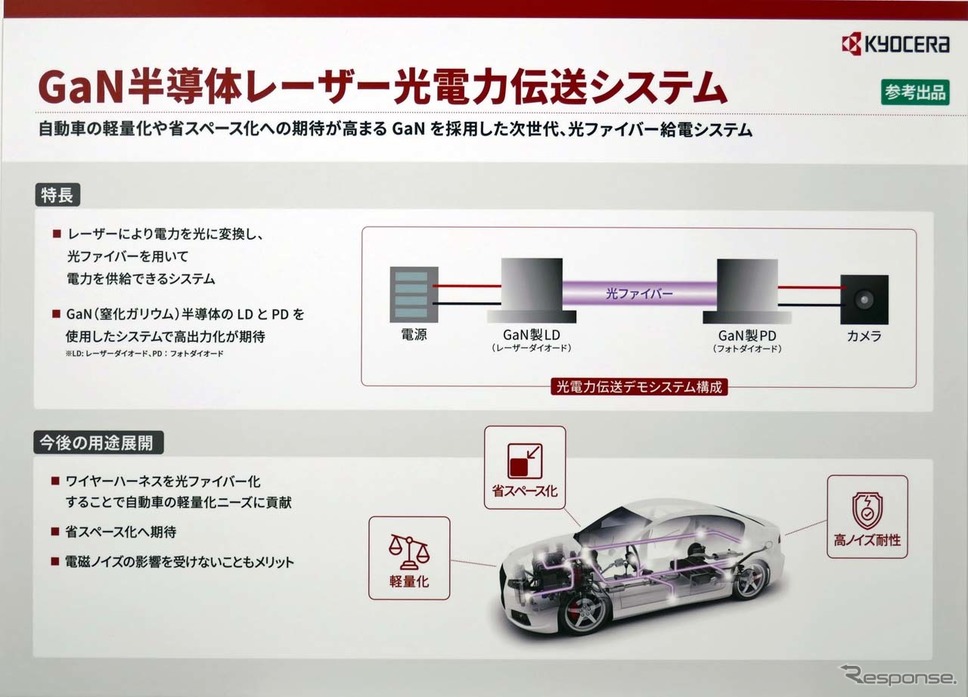
電動化が進む中でより車体の軽量化や省スペース化が求められているが、それに貢献する技術として興味深かったのが「GaN半導体レーザー光電力伝送システム」だ。
これはレーザーにより電力を光に変換し、光ファイバーを介して電力を供給するシステム。GaN(窒素ガリウム)半導体のレーザーダイオードとフォトダイオードの組み合わせにより、システムとして高出力化が期待できるという。開発担当者は「現状では受け渡し時の伝送効率が30%-30%しかないが、早期に50%-50%にまで引き上げ、実用化に目途を付けたい」とした。
◆「センシングと通信技術を応用が安心安全な社会の実現につながる」仲川本部長
京セラの仲川彰一執行役員研究開発本部長は今回の出展にあたり、「京セラが培ってきたセンシングと通信技術を応用は、ADASによる自動運転とITSインフラ技術を並行して開発することで技術の加速につながる。この路車協調の研究開発は人とくるま、人とひとのつながることが重要で、これによって希望にあふれた幸せな地域社会の実現を目指していきたい」と今後の技術開発への抱負を述べた。