ナビタイムジャパンは2月25日、ドライブレコーダーアプリ「AiRCAM(エアカム)」にて、AIによるリアルタイム画像解析で走行場所を推定し、より正確な自車位置測位が可能となる機能を追加した。
AiRCAMは、AIとARで安全運転を支援するドライブレコーダーアプリ。走行中の画像をAIでリアルタイムに解析して、運転中の危険や違反を知らせたり、見落としやすい一時停止などをARでわかりやすく表示する。
AiRCAMでは、一時停止や急カーブ、踏切、オービスの位置を画面上にARで表示してドライバーに注意喚起をする際、適切なタイミングで表示をするためには、正確な自車位置測位が必要だが、ナビゲーションをしないで利用することが多いため、ルートマッチングが働かず、自車位置の精度が落ちてしまうことがあった。
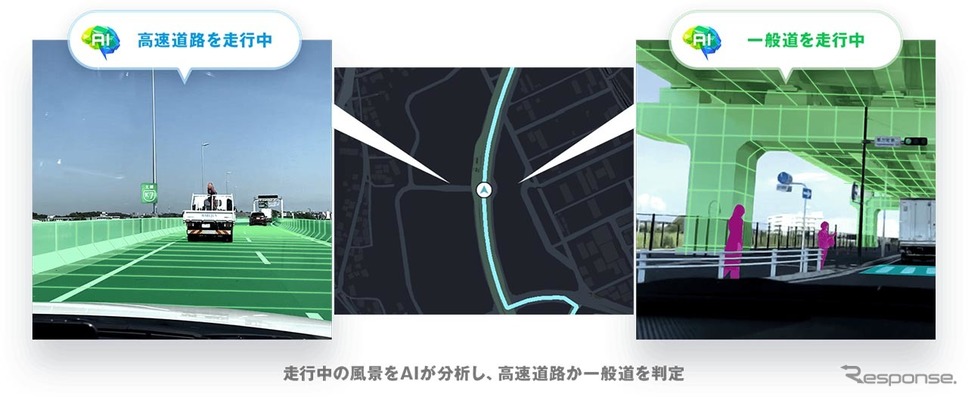
そこで、画像から位置を測定するVPS(Visual Positioning System)技術を活用し、撮影中の周囲の風景が高速道路か一般道かなどをAIでリアルタイムに解析することで、自車位置測位の精度を向上。高架上の高速道路とその下の一般道など、地図上で重なり合った道路などでも、現在走行中の道路を正確に判定し、最適な自車位置表示およびARナビゲーションを行うことが可能となった。
ナビタイムジャパンではこれまで、安全・安心で快適な移動をサポートするため、カーナビゲーションアプリにて、自車位置測位の精度向上のために、加速度センサー等の各種センサーを使用し、独自のアルゴリズムを開発するなど技術開発や機能提供を行ってきたが、それに加え、AiRCAMでは、道路やその周辺の画像分類や歩行者や横断歩道などの物体検知を組み合わせ、ドライブレコーダーの画像をAIでリアルタイムに解析する、新たなアプローチでの自車位置測位精度の向上に取り組んでいる。今後は、GPSの届かないトンネル内などでも、正確な自車位置測位やナビゲーション等を実現できるよう開発を進めていく。




