DeNAは、2月12日より愛知県春日井市の高蔵寺ニュータウンの公道で始まった、携帯電話網を用いて公道の自動運転車両に信号情報を送信する実証実験に参画した。
今回の実証実験は、名古屋大学が主体となり名古屋大学COIの自動運転車両を用いて、多様な世代での過度に自家用車利用に依存しない外出手段の確保を目的とする実証実験の一環として2月12日から28日まで実施。高蔵寺ニュータウン内を1台の自動運転車両が乗客に合わせてオンデマンドで走行する。
公道の交通ルールに従って走行する自動運転車両では、信号情報との連携が必要不可欠。これまでの自動運転車両は車載カメラを用いて信号情報を検知してきたが、前方車両による遮蔽や逆光などの環境要因によって検知が困難になることが懸念されてきた。そこで信号情報を直接車両に送り、カメラによる信号検知システムと補完し合うことでより確実な信号情報の検出が可能になることが期待される。また、信号情報を自動運転車両が遠距離で得ることで、事前に車両の速度を制御し、交通渋滞の緩和や環境負荷の低減に繋がることを目指す。
これまで、2018年4月に神奈川県藤沢市、2019年3月に愛知県常滑市で実証実験を実施し、技術、安全面を検証。引き続き公道で範囲を広げた実証実験を行い、将来の一般化、拡大に向けた検証を行う。
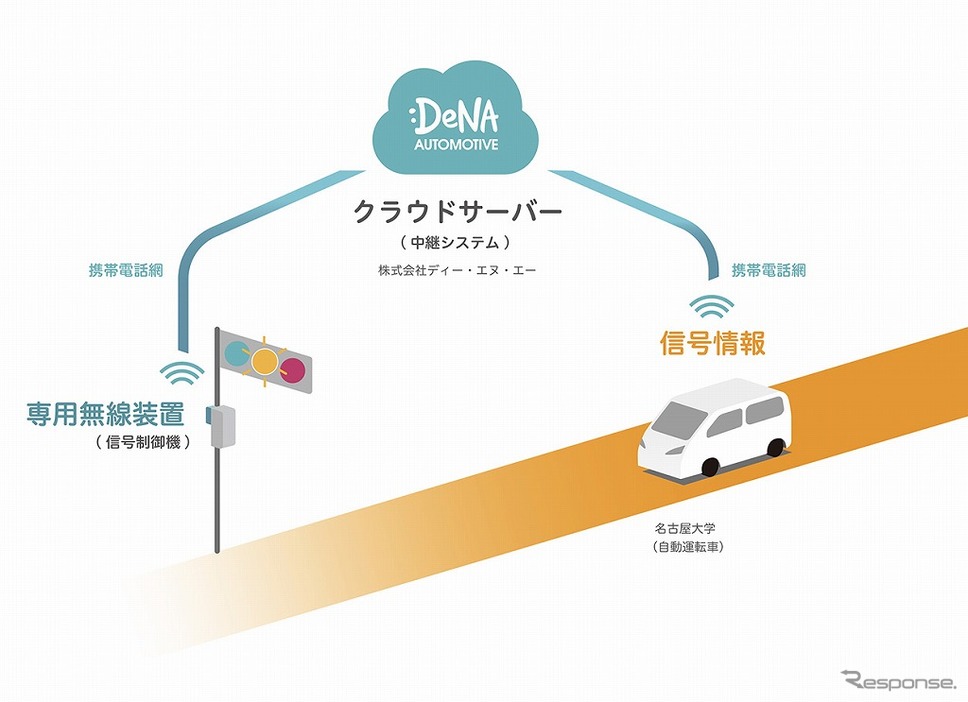
今回の取り組みでは、2つの交差点の信号制御機(うち1つは感応式)に日本信号の専用無線装置を取り付け、実証実験を実施。DeNAは、信号の灯色や残り時間などの信号サイクル情報を携帯電話網を用いてクラウドサーバーを中継し、リアルタイムに自動運転車両へ送る役割を担った。同システムの開発では、DeNAがこれまで培ってきたクラウドの技術やシステム作りの経験を活かし、低コストかつ汎用的な仕組みを実現。信号情報を受けた車両は、自動運転システムによって「進む」か「停止」かの制御を行う。
実証実験を通して、道路側のインフラと車載システムが協調して事故を防止する「インフラ協調型システム」の導入を推進。自動運転サービスの実現だけではなく、インフラやクルマからの情報を活用して、より完成度の高いシステムの実現を目指していく。