西松建設は、国内で初となる、トンネル坑内でローカル5Gを使用したホイールローダの遠隔操縦を試行した。10月8日に発表した。今回の試行を足掛かりにトンネル工事の無人施工の実現に向けて取り組みを加速する。
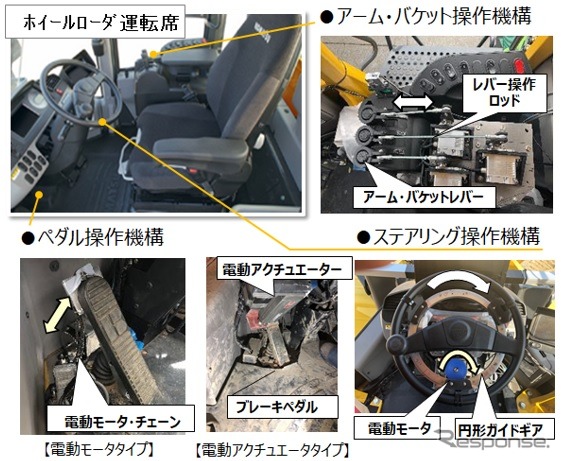
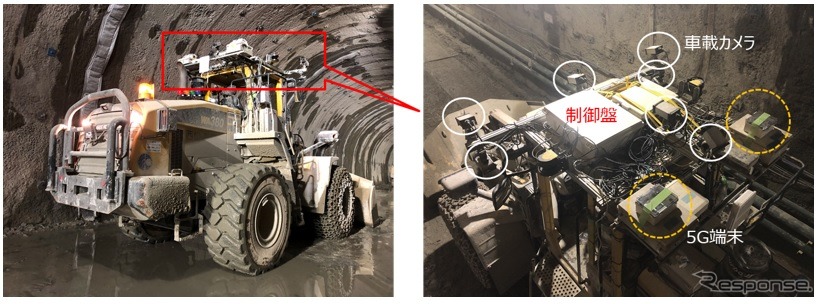
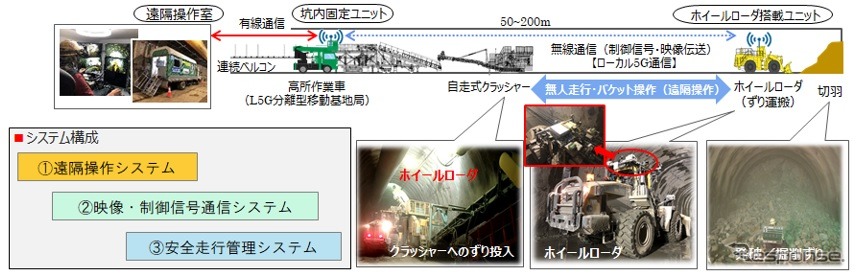
同社はカナモト、浅草ギ研、ジオマシンエンジニアリングと共同で山岳トンネル掘削時のずり運搬に使用されるホイールローダをローカル5G通信を使って遠隔操縦するシステムを開発した。ローカル5Gを使用するホイールローダ遠隔操作システムは遠隔操作システム、映像・制御信号通信システム、安全走行管理システムで構成する。
システムの試行は国道5号仁木町外・新稲穂トンネル工事で、ホイールローダによる坑内走行、掘削ずりの運搬やクラッシャーへの投入といった実施工と同様の作業を遠隔操作で実施した。
実証実験の結果、運転操作に大きく影響するような映像伝送遅延や通信上の不具合は発生せず、狭隘な坑内でも有人運転に近い時速20km/h程度の高速走行や掘削ずりの積み込み、クラッシャー投入時の微妙なバケット操作を遠隔で実施することができたとしている。
開発したシステムは今後、現場試行を継続しながら改良してシステムの早期実用化を目指す。