ヴァレオとダイナミックマップ基盤(DMP)は2月25日、自動運転システムの開発を促進するために、正確な自車位置推定とHDマップ更新のための技術とビジネスモデルを共同開発することで合意したと発表した。
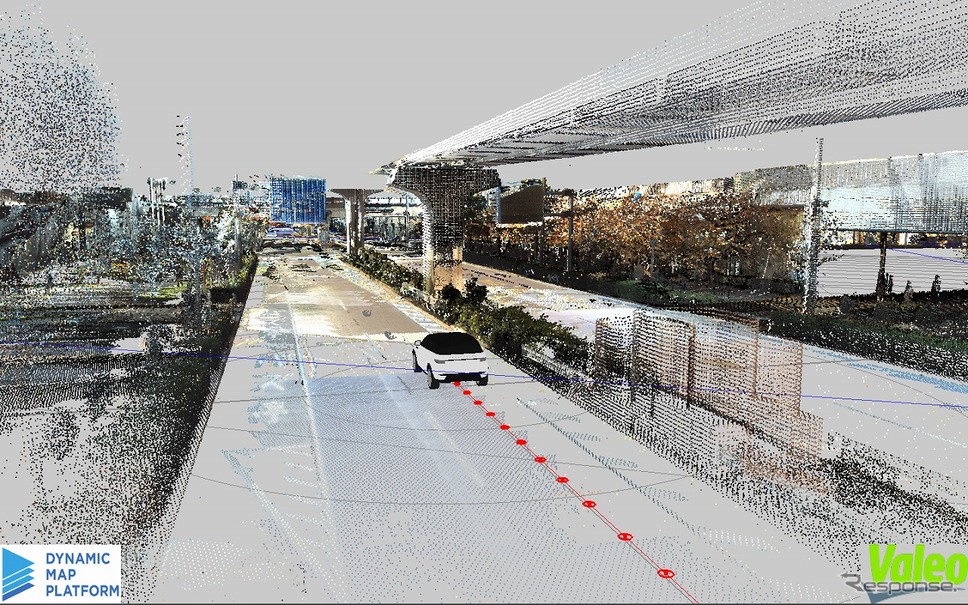
ADAS(先進運転支援システム)と自動運転の開発では、車両が周辺環境を認識し、自車位置を正確に特定することが重要となる。また、インフラや道路環境の変化に対応する上で、自動運転車が使用するHDマップの定期的な更新も課題となる。
両社は、ADASや自動運転の品質向上に必要な高精度自車位置推定技術、地図更新技術について、非独占的にグローバルに共同でサービスを提供することを目的に、技術・事業の両面から協業を検討することで合意。安全で安心な自動運転の実用化を目指す。





