今回の人とくるまのテクノロジー展では「自動運転技術、進化と現状」という特別展があり、そこには三菱電機が『アウトランダーPHEV』をベースに作った自動運転車『xAUTO』と、金沢大学 新学術創成研究機構 自動運転ユニットが開発中の自律型自動運転自動車などが展示されていた。
金沢大学の自律型自動運転自動車はこれが2代目で、トヨタ『アルファード』をベースに製作されている。
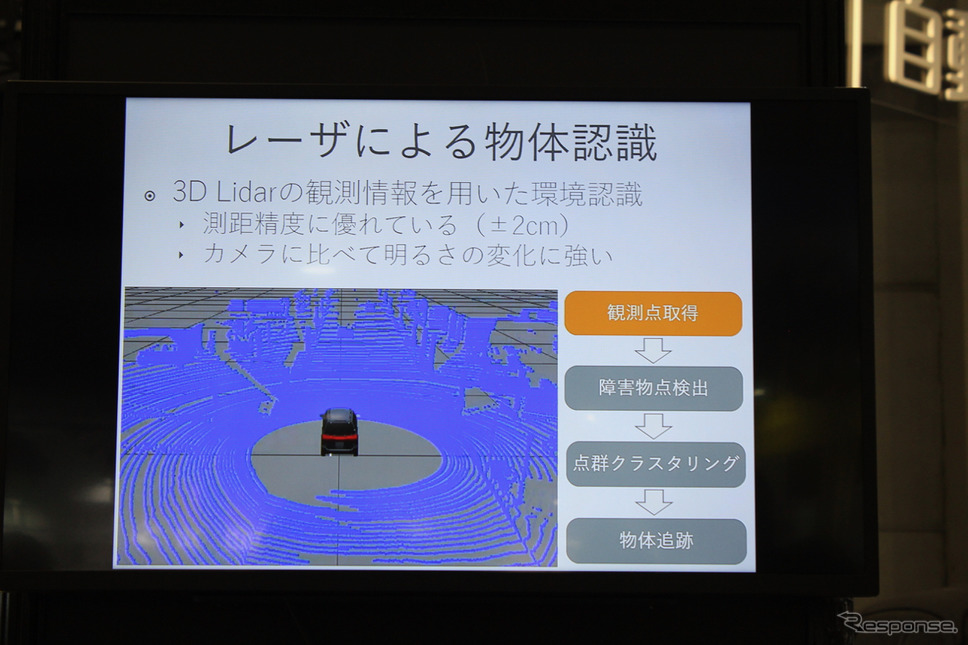
会場内に置かれている車両のルーフに取り付けられているLiDARが回転し作動しているのが分かる。目前のモニターには、そのLiDARがセンシングした会場内の状態が映し出されていた。来場者が移動すれば、モニターの画像も人物のシルエットが変化する。
搭載されているLiDARとミリ波レーダー、そしてカメラで前方の障害物や道路を検知し、高精度な地図データと検証しながら走行していく仕組みだ。雨など悪天候の際にカメラが機能しなくなっても、LiDARとミリ波レーダーでカメラの情報を補完して走行を続けることができるらしい。
LiDARでは周囲60から80mまでの障害物検知は精度を保証できるそうだ。最近のLiDARの中には、さらに150m以上の距離までセンシングできる機種もあるようだが、実際にはレーザーの束が遠くに行くほど拡散してレーザー波の間隔が広くなってしまうのと、レーダー波が反射して戻ってくる間にクルマも進んでしまうため実用面での意味合いは薄いらしい。
金沢大学 新学術創成研究機構 自動運転ユニットの米陀佳祐助教授によれば、同ユニットではすでに3年間、実証実験を行っており、金沢市内であれば一般道を自動運転で走行できるようにまでなったと言う。
「金沢は四季によって路面状況も大きく変わるので、データを取る地域としても非常に適しているんです。公道実験では自動運転にもクセはあるので、運転技術をもち自動運転システムを熟知しているドライバーが運転席に座ることで、変な挙動が出る前にオーバーライドすることで安全を担保しています。もっとも、オーバーライドするようなことはほとんどありません」。
公道実験にはリスクも伴うが、そこでしか得られないデータも多い。万全の体制を敷いた高度な技術をもつ同ユニットのような存在が、自動運転技術を加速させていくのだと痛感した。