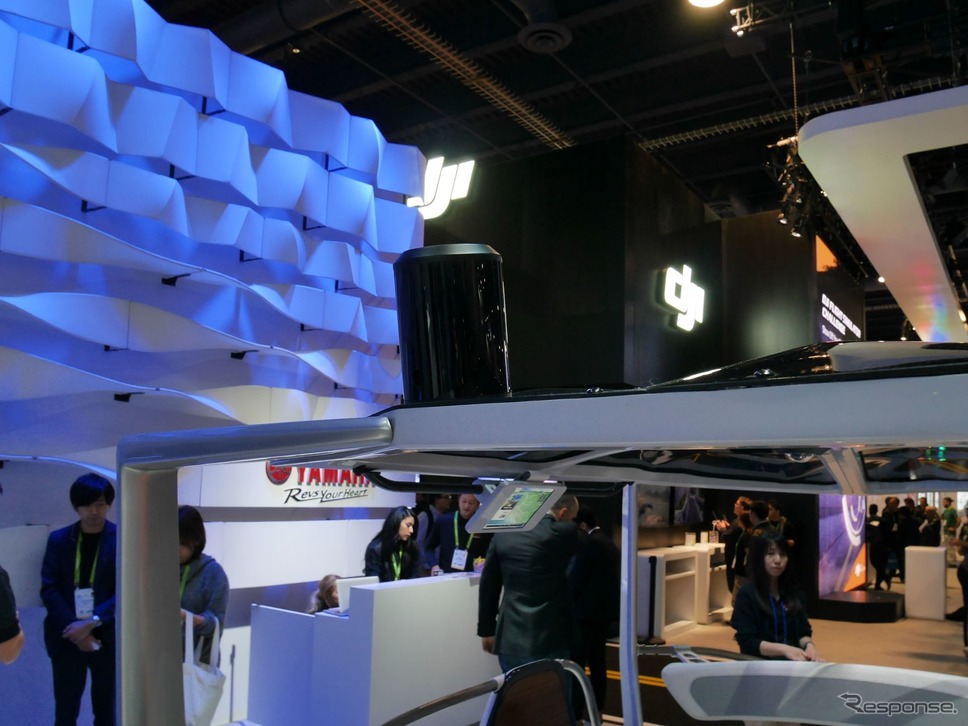
CES 2018で、関係者の間で話題になっていたのが、”ワンマイルモビリティを再定義する”というコンセプトのヤマハの低速自動運転車だ。
ヤマハは以前から誘導線に沿って自動走行するゴルフカートを販売しており、これを利用して、2017年度から各地で実施されている公道での自動運転実証実験にも参加している。
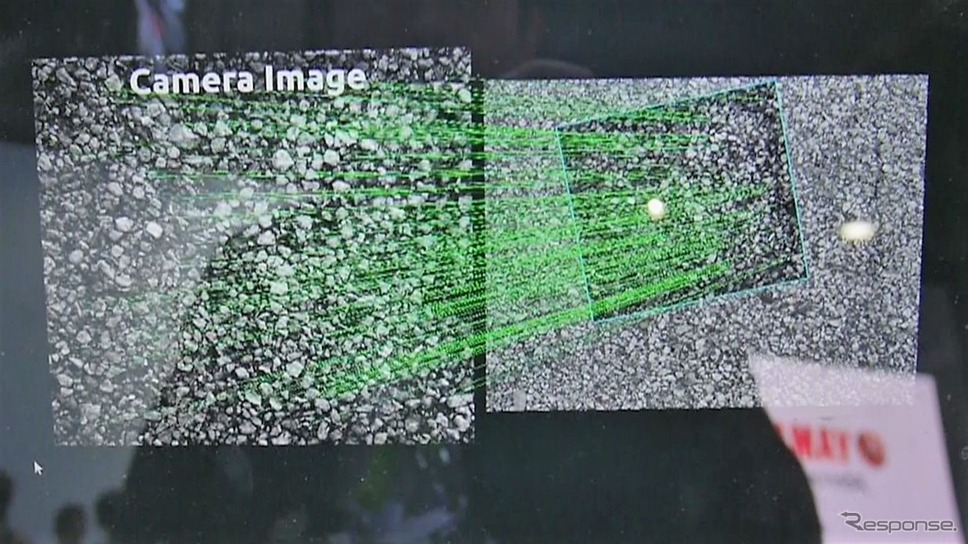
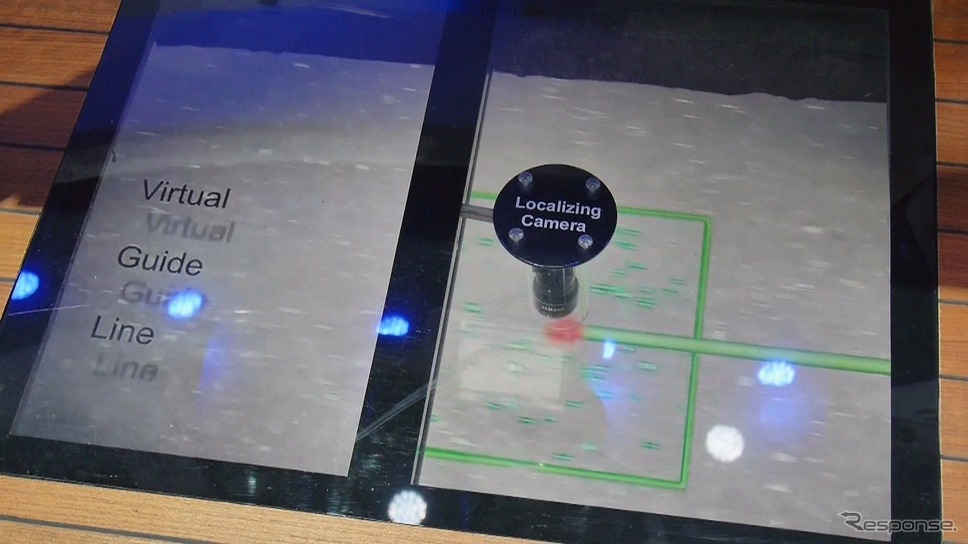
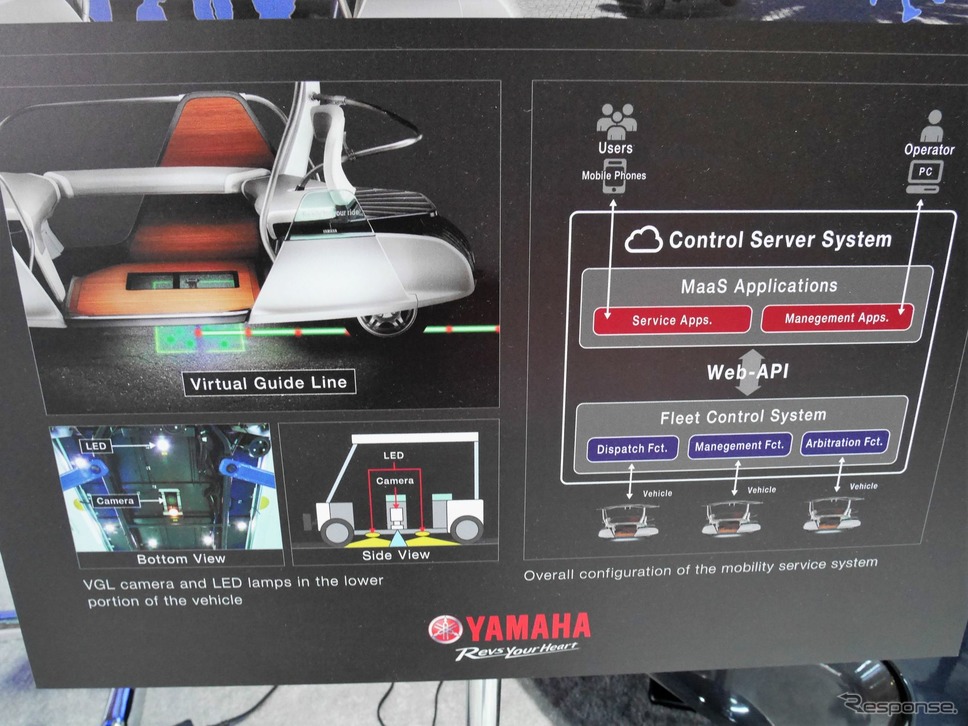
だが今回のCESで初公開されたのは、誘導線ではなく、道路表面の映像を照合しながら走るという新しい方式のものだ。これは、事前に撮影した道路表面の映像と、車両下部に設置されたカメラで、走行しながら撮影した映像を照合して、自車位置を特定して走行するというものだ。
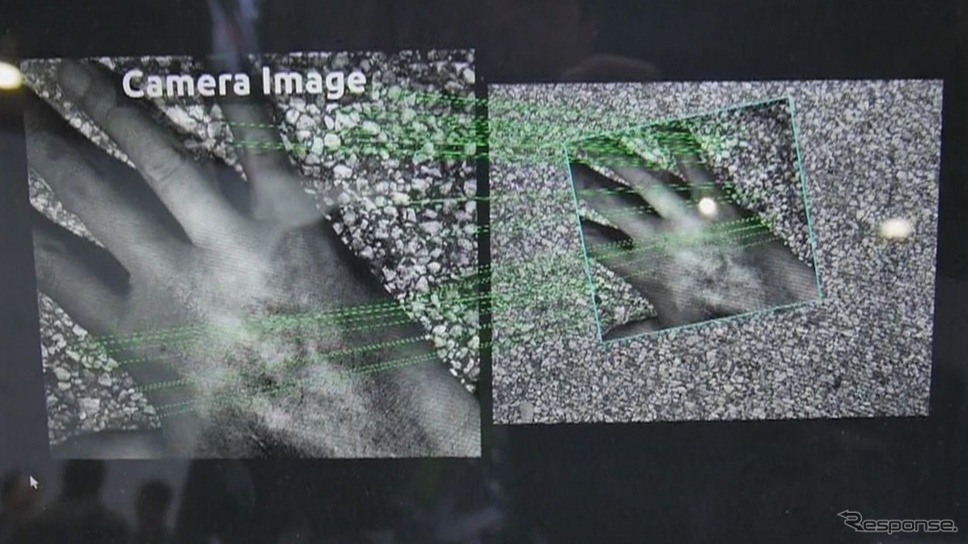
誘導線のように定期的なメンテナンスを必要とせず、自車位置精度が非常に高いのが特徴だという。同社モビリティ技術本部の藤井北斗氏によると、「撮影した映像の特徴点を照合しながら走行します。雨やゴミなどが映っても、特徴点がとても多いので、自車位置を特定することが可能です」とのことだ。
実際に、道路の表面を特定する様子をデモ展示していたがが、道路表面が50%ほど隠れてしまっても、特徴点を照合することができていた。多少のゴミや道路表面の変化は問題にならないという。スピードに関しても、「20km/hならまったく問題ない。それ以上でもある程度はいける」(藤井氏)。
現段階で標準的な自動運転システムと言えば、高精度地図データとLiDARなどセンサーフュージョンの組み合わせで自車位置を特定するものだが、ヤマハの提案する方法は、事前のデータは道路の撮影なので低コストで済み、また前述の通り多少の道路表面の変化を問題とせず、ロバスト性が高い。また、「この方法による自車位置精度は2.6mm」(藤井氏)と非常に高精度でもある。
障害物の検知については、ルーフに取り付けられたLiDARとカメラのセンサーフュージョンで行うという。
今後については、商品としての信頼性を高めたうえで、「ゆくゆくは、現行の誘導線を利用した自動走行車の置き換えも考えていきたい」と、同社モビリティ技術本部の吉田睦グループリーダーは話した。
低速域における自動走行システムとして、今回のヤマハの提案は、コスト面やメンテナンス性などを考えても現実味を感じさせ、この先の展開に大きな期待を持たせるものであった。